服务咨询热线
400-637-5237
132-2203-8382
服务咨询热线
400-637-5237
132-2203-8382

电 话:400-637-5237
手 机:13222038382
传 真:025-57482319
邮 箱:Sale.tang@jptec.com.cn
网 址:www.jptec.com.cn
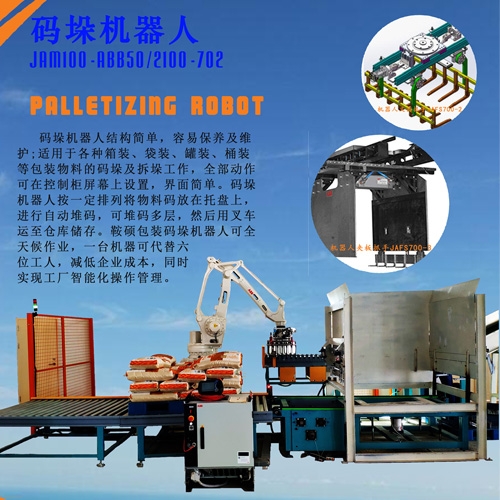
码垛机器人防护栏区域有一个安全光电传感器,当在码垛过程中检测到有人或物进入工作区域,机器人立即停止工作。当待抓取区有袋时全自动码垛机器人抓取饲料袋放入事先放好的托盘中,托盘由人工采用行吊吊入或铲车送入,每次吊入一至三个托盘,三个托盘由三组光电传感器来检测,托盘每层放5袋饲料,采用三二方式码放,共8或10层,单层和双层采用三二交叉方式码放。托盘放满后,由铲车铲走,并给机械手一个信号,机械手开始第二个托盘的码垛工作。
饲料袋缝纫后进入辊道线,辊道线由电机带动,饲料袋放倒位置检测开关检测饲料袋到位后,由机械推到或气缸推动将饲料袋由立式放倒,进入辊道输送线,而后进入震动辊道线,然后进入待抓取区辊道线,等待机器手抓取。待抓取区辊道线由电机带动,经皮带传输带动滚道运转,待抓取区辊道前后端由光电传感器检测,前端光电传感器为饲料袋进入待抓取区信号,后端光电传感器为饲料袋进入待抓取区到位信号。当饲料袋到位后,电机停止,等待机器手抓取。饲料袋输送压平线末端有一个光电传感器,当待抓取区有饲料袋未抓取,而且输送压平区也有饲料袋时,输送压平区电机停止。否则输送压平区继续运行将饲料袋送入待抓取区。